GRACE, the gliding robotic fish, is a semi-autonomous underwater robot developed in SML. The project has spanned 3 dissertations, including mine.
Grace was initially built for mobile sensing in aquatic environments. The robot is capable of long-duration operation due to the energy-efficient gliding mechanism that uses buoyancy as the primary method of propulsion. It has a tail that allows it to steer while gliding, make rapid turns, or swim by flapping its tail like a real fish. It can also orient the nose up or down by sliding mass internally.
The initial concept has evolved and become more capable over the years. I was lucky enough to be able to contribute to the project by designing PCBs, developing software on microcontrollers and single-board computers, designing mechanical components for the robot, designing control and adaptive sampling algorithms for the robot, and even providing a new design philosophy for the third generation of the robot.
 gen1 |  gen1robofish2 |
|---|---|
 gen2fleet |  glidingfish |
 HigginsOnBoat |  Gen3SideView |
 Gen3Dive |
Grace
Grace
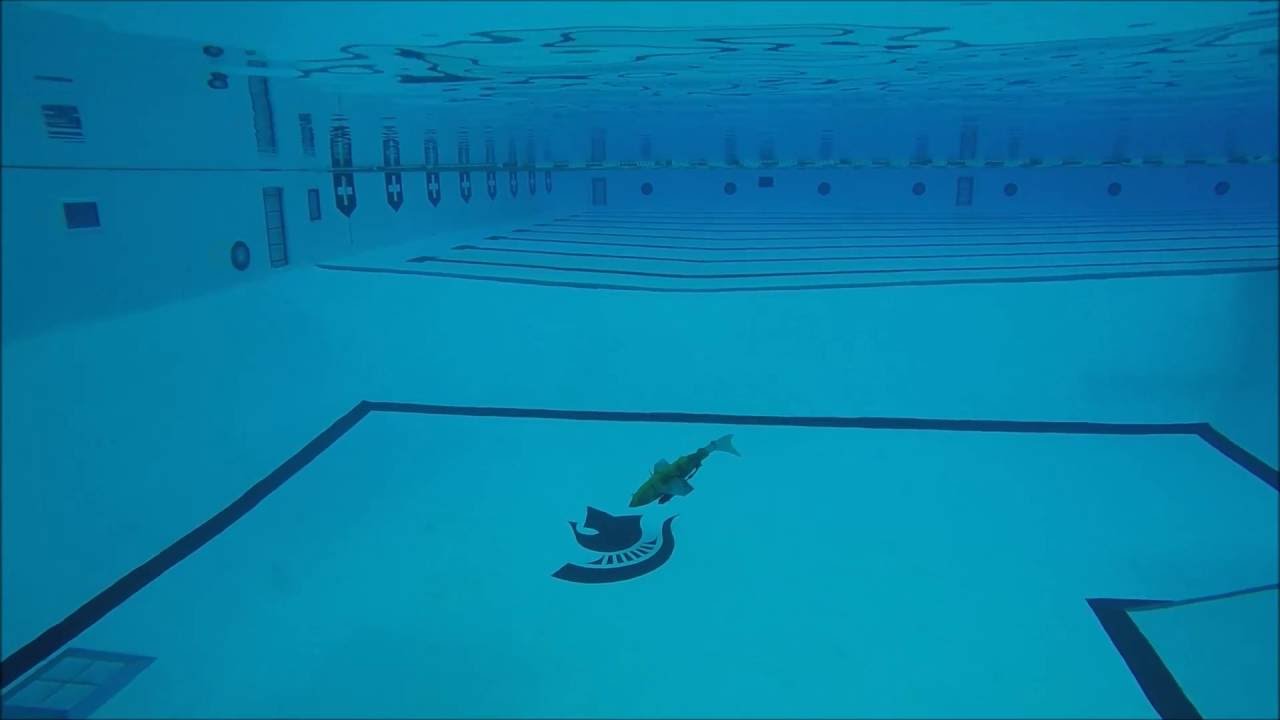
Gliding Robotic Fish Glide & Swim in Pool (Underwater View)

Fish-like underwater glider spiraling down

Gliding robotic fish GRACE 2.0 hitting Higgins Lake (Underwater View!)
